Migliorare la sicurezza e ridurre l'ingombro della cella robotizzata
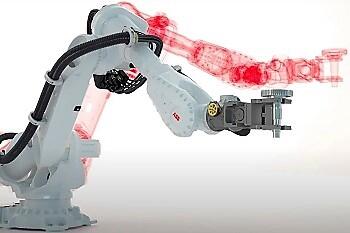
Il software di programmazione e simulazione offline RobotStudio di ABB è stato aggiornato con una nuova funzione di frenata virtuale del robot, progettata per creare una simulazione esatta della distanza di arresto reale di un robot. Consentendo di calcolare con precisione la spazio di arresto del robot, la funzione elimina la necessità di aggiungere ulteriori elementi di sicurezza nei progetti delle celle di produzione, consentendo risparmi di spazio fino al 25%.
Prevedere esattamente dove si fermerà un robot dipende da una serie di variabili tra cui velocità, carico e inerzia del robot stesso. Questi fattori, singolarmente o combinati, possono provocare l'arresto del robot al di fuori della sua zona di sicurezza, a volte di diversi metri. Per compensare la variabilità delle distanze di arresto, gli ingegneri che progettano celle robotizzate tradizionalmente le sovradimensionano per consentire movimenti aggiuntivi quando il robot si ferma, utilizzando spazio così non disponibile per altre attività all'interno dello stabilimento.
La nuova funzione RobotStudio utilizza la tecnologia di controllo del movimento di ABB per prevedere i movimenti del robot con precisione millimetrica. Ciò consente di simulare il movimento esatto del robot in RobotStudio, consentendo all'utente di determinare la dimensione corretta della zona di sicurezza richiesta e l'ubicazione ideale di protezioni, quali barriere fotoelettriche e recinzioni di sicurezza.
Per le applicazioni che utilizzano il software SafeMove di ABB, i dati sulla posizione finale del robot possono essere utilizzati per determinare la dimensione delle zone “verde”, “arancione” e “rossa” dove il robot continuerà a lavorare, rallenterà o si fermerà, a seconda della posizione dell'operatore. Ciò è particolarmente vantaggioso nelle applicazioni collaborative in cui gli operatori devono essere sicuri che un robot si sia fermato prima di avvicinarsi.
"La nostra nuova funzione di RobotStudio di distanza di arresto del robot fornisce all'utente informazioni sui movimenti reali di un robot con un livello di precisione senza precedenti. Prevedere il comportamento di arresto di un robot con il suo carico aiuterà gli integratori e gli utenti finali a risparmiare tempo e costi, con una riduzione dell'ingombro fino al 25% quando si tratta di progettare e costruire una cella robotizzata o di approntare un’area di sicurezza. Ciò aiuterà i nostri clienti a ottimizzare i loro processi e ottenere il massimo dalle loro soluzioni di automazione", ha affermato Antti Matinlauri, product manager di ABB Robotics.
In quanto ambiente virtuale per la programmazione e la simulazione di installazioni robotiche complete, RobotStudio, consentendo di dimostrare e testare offline i progetti delle celle, può aiutare ad abbreviare i tempi complessivi del progetto permettendo di perfezionare i miglioramenti prima della costruzione di una cella reale.

Notizie più lette