Per ridurre al minimo i tempi improduttivi nello stampaggio a iniezione, una delle strade per ammortizzare macchine e impianti nel più breve tempo possibile in tutti i processi di trasformazione, Wittmann propone la generazione di robot W8 e WX con funzione SmartRemoval brevettata come standard, che riduce automaticamente il tempo di rimozione dei componenti dall’area dello stampo senza l’intervento dell’operatore.
La riduzione dei tempi di rimozione dallo stampo non consente solo di abbattere i tempi improduttivi ma anche di diminuire il consumo totale di energia conseguente allo stampo aperto per un periodo prolungato e di ottenere un processo più costante. Peraltro, il processo di stampaggio a iniezione in quanto tale risulta sostanzialmente inalterato, poiché la funzione SmartRemoval influenza solo il tempo necessario per rimuovere l’articolo dalla pressa, mentre tutti gli altri parametri rimangono invariati.
La funzione SmartRemoval è inclusa come standard nei sistemi di controllo robot R8 e R9 per calcolare automaticamente fin dal primo ciclo quanto tempo richiede il movimento di apertura dello stampo, così che, in tutti i successivi cicli di rimozione, l’automazione non debba attendere l'apertura completa della metà mobile dello stampo, ma sposti in anticipo l'asse verticale del robot, un po’ come accade negli sport motoristici con la così detta "partenza in volo". Quando lo stampo è completamente aperto, l'asse si sta già muovendo a una velocità ottimale e può ulteriormente accelerare per la rimozione vera e propria all'interno dell'area dello stampo aperto.
Diversamente dai processo convenzionali di rimozione sequenziale, la pinza del robot arriva prima nella posizione in cui avviene il trasferimento dell’articolo stampato.
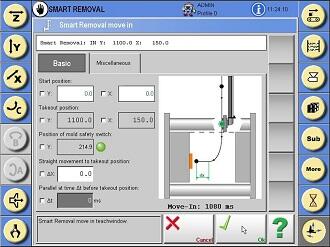
Nella fase così detta “Move In”, la sincronizzazione con gli eiettori funziona in modo simile. Sulla base di precedenti misurazioni automatiche, il robot emette il segnale di espulsione già prima che arrivi alla posizione di rimozione, in modo che quando la raggiunge può prendere direttamente le parti senza dover attendere la risposta degli eiettori stessi. Nella successiva fase "Move Out", il momento ideale per inviare alla macchina il segnale di chiusura dello stampo - prima che il robot si sia spostato completamente fuori dall'area dello stampo stesso - viene calcolato in modo simile. Lo scopo di queste rilevazioni è quello di eliminare dal processo i ritardi causati dalla trasmissione del segnale elettrico.
In fase di test, il sistema installato su un robot W818 di piccole dimensioni ha consentito di ridurre del 20% un tempo di rimozione di un secondo, ossi di 0,2 secondi. Con i modelli più grandi, come il WX173, il tempo di rimozione è stato ridotto da 1,7 a 1,2 secondi, ossia del 30%.
Most read news